Horizon
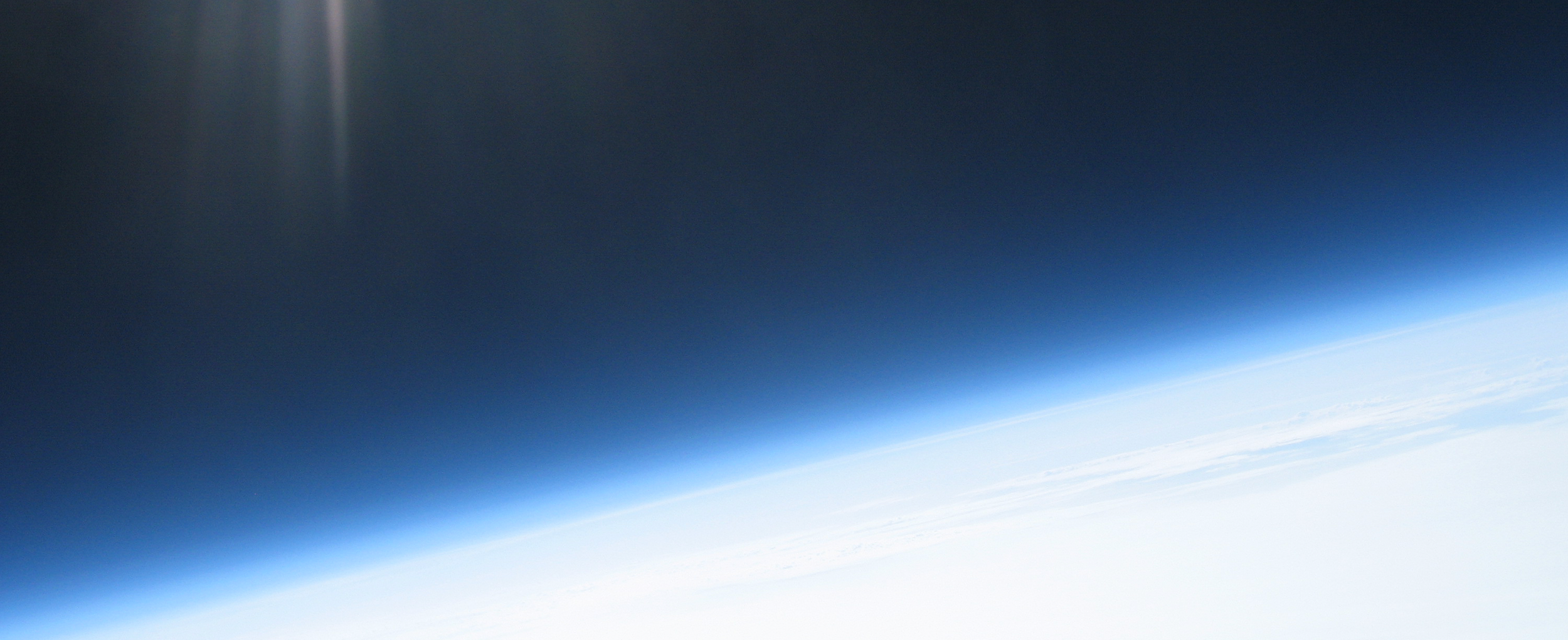
On April 26, 2011, YUAA successfully launched and retrieved the YUAA Horizon, a second-generation high-altitude vehicle built by the YUAA. Horizon remains one of the most advanced amateur balloons to date, featuring two independent tracking systems, a failsafe aborting mechanism, a camera, and sophisticated software applications for real-time tracking on the ground.
Horizon was launched on 26th April 2011 at 8:30AM EST from New Britain, CT and retrieved 2 hours 45 minutes later, approximately 45 miles northeast of the launch site.
Body
The Horizon body consisted of a two-tiered construction encased by a 1-inch thick Styrofoam shell. A 48-inch diameter parachute was directly attached to the box by a steel carabiner. A line ran from the top of the parachute, through a loop on the balloon, through the box and attached to its bottom. Inside the box, the line was wrapped around a nichrome wire. This design allowed us to release the balloon from the box while keeping it above the parachute. A 1000-gram Kaymont sounding balloon was used to lift Horizon.
On Board Systems
Camera
Pictures were taken at 7 second intervals by a Canon camera loaded with CHDK firmware. Pictures were taken throughout the duration of the flight.Tracking
The main tracking system consisted of an Arduino Mega microprocessor that received GPS data from a serial GPS module and encoded it to a custom telemetry format. The location data was then sent to a mobile receiving station on the ground through a radio transceiver that used a custom copper-wire antenna specially designed for the transmitting frequency. Data was sent once every second. The signal was received by an identical transceiver on the ground and then logged into a file on a laptop. An iPhone application was designed to display the map position of the Horizon vehicle in conjunction with the position of the retrieving team on the ground. All systems functioned in real-time throughout most of the flight, a notable achievement.Redundant Tracking
An independent commercially available GPS tracking system was also employed to provide a redundant source of tracking. The SPOT satellite tracker selected for use on the Horizon was supposed to transmit its location every 10 minutes. However, it turned out that the SPOT worked only on the ground. It did not report any data until it landed, which was nevertheless useful.Release Mechanism
In case the balloon did not pop or the aircraft was drifting to an inaccessible location, we designed a release mechanism that would cut the line, dropping the payload and parachute. Having no moving parts, the release mechanism consisted of a nichrome wire that heats up and melts the line attached to the balloon wrapped around it. The release mechanism could be activated by either a command from the ground, a three-hour timeout, or by failure of the on-board microprocessor. An independent circuit that interfaced with the microprocessor was designed to control it. The release mechanism was used in an attempt to free Horizon from the tree that it landed in. Activated by a signal on the ground, the line was successfully cut, helping to slightly lower the payload in the tree.
Flight Statistics
Max altitude: 45,000 ft
Vertical distance traveled: 44.68 miles
Flight time: 2 hr 45 min
Live communication: Approximately 75% of the flight
Landing location: 41.89411, -71.98898
Full report of the mission can be downloaded here: Horizon Mission Report