Command Center
The Command Center was a YUAA project designed to fulfill the electronics needs of any future craft developed by the organization. Its main goal was to create a modular package capable of redundant communications methods, computational processing, location tracking, motor control, and sensor data logging. After a year of design, the Command Center supported a variety of features to meet the general criteria of these goals. These features allowed it to control any aerial platform the YUAA built and develop autonomous control of these projects.

Features:
1 GHz Beaglebone Black Linux Processor
Transceiver Point to Point Communication
Cell Network Communication
Orientation, Gyro, and Heading Measurement
GPS Tracking
PWM Output for Servo Control
Analog Signal Input
Digital Signal Input and Output
Internal Temperature Monitoring
DETAILS
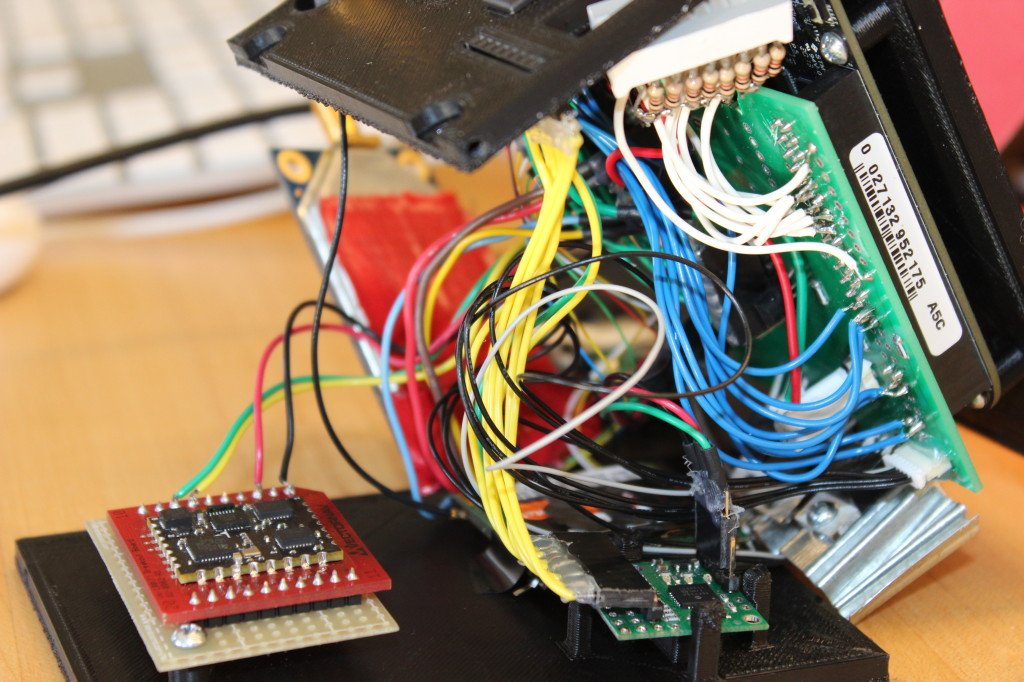
The Beaglebone Black (BBB) combined the interfacing capabilities of an Arduino with the power of the Linux operating system. The BBB featured 5 UART communication lines, 2 SPI busses, 2 I2C busses, and GPIO pins broken out to two 46 pin expansion headers for easy access. Combined with its 1 Gz processor, the BBB compiled and processed the data collected by the peripheral components of the Command Center. Only with the power of the BBB was the Command Center able to make the calculations necessary to run an autonomous aerial system.
The Command Center had two modes of communication. It featured powerful 1 watt Digi International transceivers with a range of up to 40 miles point-to-point with the appropriate high gain antennas. These transceivers were the main method of communication as they provided instantaneous data streaming between the Command Center and ground controllers. The Command Center also featured a GSM cell module for communication through the cell network. This featured added redundancy and reliability for situations where the transceiver signal was weak or lost with interference and obstructions. The cell module was capable of sending and receiving text messages with ground controllers.
In order to design a successful control system for a craft, the system needed feedback information about the state of the craft. The Command Center used a Vectornav VN-100 IMU to collect orientation, heading, and angular velocity data. This data was vital to closing the feedback loop of a control system. The Command Center also used a GPS chip to gather location and altitude data for general navigation. Together, the IMU and GPS provide the necessary data to stabilize and navigate an aerial craft. The Command Center could use this data to create a feedback solution to controls the flight surfaces or motors of the craft using the PWM output generated by a servo controller.
Finally, the Command Center was equipped with input and output ports to measure a variety of data about its surroundings. The on-board analog to digital converter read 7 analog signals into the BBB. These ports could be used for any type of sensor, from temperature, pressure, or even strain measurements. There were also 8 available digital input or output pins for interfacing with additional components. The Command Center monitored its internal temperature as well to protect from overheating. By integrating a variety of sensors, the Command Center was fully capable of managing the communications, stabilization, navigation, control, and data collection of any aerial platform designed by YUAA.
In 2014, the UAV team implemented the Command Center to control their RC plane which was deployed from a rocket at altitude.